【重发】车联网安全-总线安全(一)
对于车联网比较陌生的小伙伴可能不太清楚总线是什么,这里给大家简单介绍下,总的来说就是车内各个零部件控制,通信的作用:
汽车总线(automotive bus)随着汽车各系统的控制逐步向自动化和智能化转变,汽车电气系统变得日益复杂。传统的电气系统大多采用点对点的单一通信方式,相互之间少有联系,这样必然会形成庞大的布线系统。据统计,一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点可达l5 00个,而且该数字大约每10年就将增加1倍。这进一步加剧了粗大的线束与汽车上有限的可用空间之间的矛盾。无论从材料成本还是工作效率看,传统布线方法都不能适应现代汽车的发展。另外,为了满足各电子系统的实时性要求,须对汽车公共数据(如发动机转速、车轮转速、节气门踏板位置等信息)实行共享,而每个控制单元对实时性的要求又各不相同。因此,传统的电气网络已无法适应现代汽车电子系统的发展,于是新型汽车总线技术便应运而生。(摘自百度)
这里我就来以个人经验来介绍下目前常用的车载总线,在市面上的汽车基本以CAN,CANFD,Flexry,LIN等为主(由于网上文章太多具体知识就不再详细讲解了自行搜索)。而最常用的应该就属CAN和CANFD的,在这里就不具体说CAN,CANFD是什么了简单来说CANFD就是CAN的扩展。那么我们如何进行渗透呢?首先是需要知道怎么接入总线,在零部件中接入总线方式一般为CAN_H和CAN_L接入前提就是需要知道引脚一般使用DB9的头子,而整车得接入一般通过ODB口接入整车。

(ODB转接头)

(DB9转接头)
说到转接头了那么我们还需要的就是CANBOX了,有了CAN盒子我们才能与之进行通信,CAN盒子的话市面上常见的PEAK-CAN(支持Liunx,性价比较高),USBCAN(可视化操作更便捷),CANOE(功能最强大,最昂贵)等等设备,根据自己的实际情况选择吧,到这里我们就可以进行对CAN的测试了。

(CANOE)

(PEAK-CAN)
CANBOX准备好了那么就可以监听CAN总线了,在接入CAN总线时需要设置波特率,CAN一般为500k,CANFD一般为500k/2m。在Windows下直接根据CAN盒子配套的软件可视化设置就好,Liunx下需要自行配置:
CAN/CANFD:
1、首先关闭can通道:
sudo ip link set down can0
2、设置can通道的波特率:
sudo ip link set can0 type can bitrate 500000 //CAN
sudo ip link set can0 type can sample-point 0.5 bitrate 500000 dbitrate 2000000 dsample 0.5 fd on//CANFD
3、开启CAN通道
sudo ip link set up can0
发送数据使用cansend,接收数据使用candump就能进行监听了
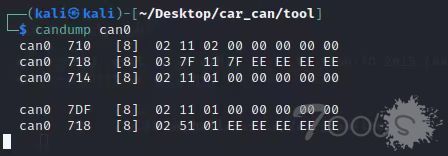
(Linux)
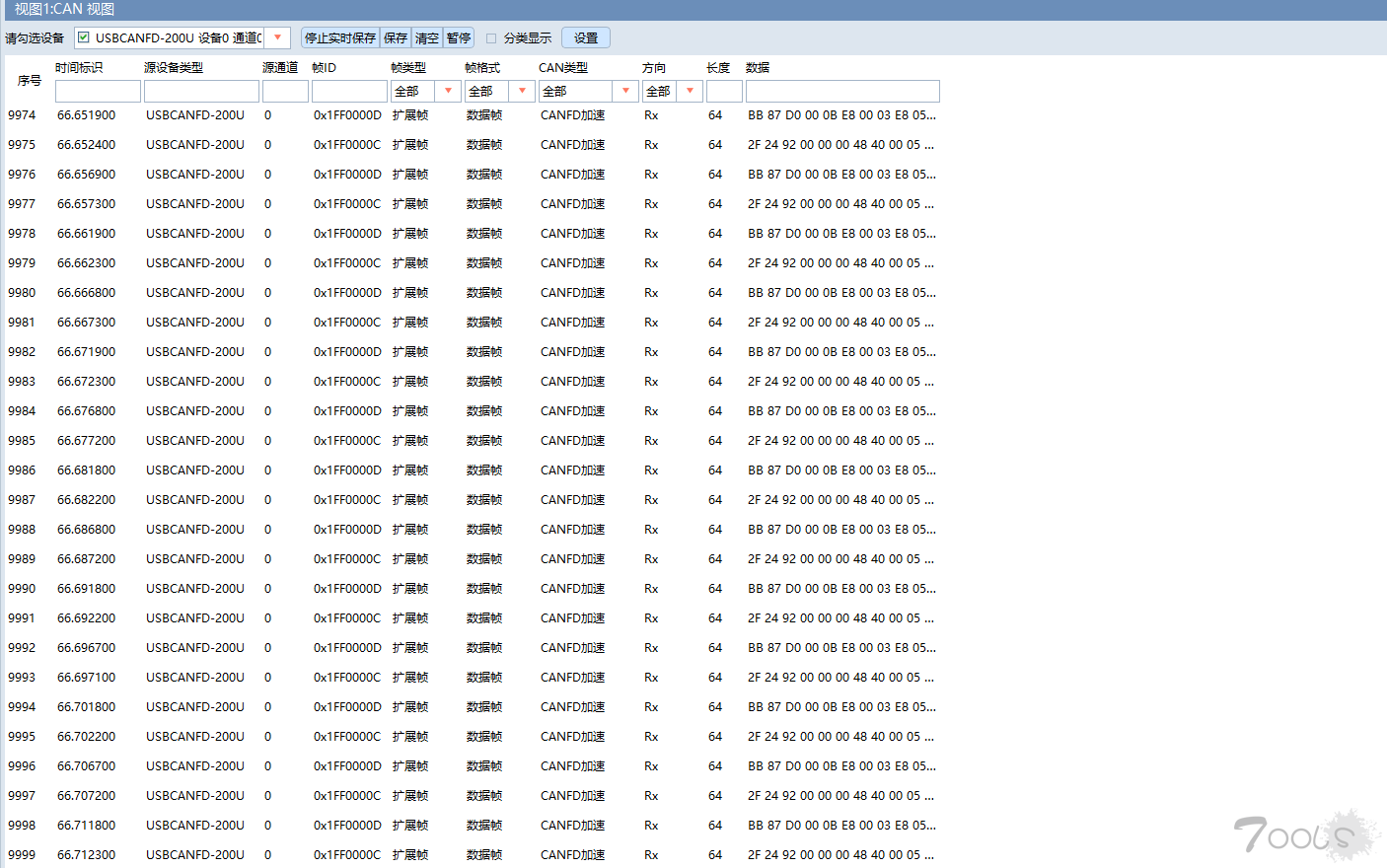
(Windows)
以上是接入CAN总线的数据,可以开始对总线进行测试了!
TCV 0.5
汽车总线(automotive bus)随着汽车各系统的控制逐步向自动化和智能化转变,汽车电气系统变得日益复杂。传统的电气系统大多采用点对点的单一通信方式,相互之间少有联系,这样必然会形成庞大的布线系统。据统计,一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点可达l5 00个,而且该数字大约每10年就将增加1倍。这进一步加剧了粗大的线束与汽车上有限的可用空间之间的矛盾。无论从材料成本还是工作效率看,传统布线方法都不能适应现代汽车的发展。另外,为了满足各电子系统的实时性要求,须对汽车公共数据(如发动机转速、车轮转速、节气门踏板位置等信息)实行共享,而每个控制单元对实时性的要求又各不相同。因此,传统的电气网络已无法适应现代汽车电子系统的发展,于是新型汽车总线技术便应运而生。(摘自百度)
这里我就来以个人经验来介绍下目前常用的车载总线,在市面上的汽车基本以CAN,CANFD,Flexry,LIN等为主(由于网上文章太多具体知识就不再详细讲解了自行搜索)。而最常用的应该就属CAN和CANFD的,在这里就不具体说CAN,CANFD是什么了简单来说CANFD就是CAN的扩展。那么我们如何进行渗透呢?首先是需要知道怎么接入总线,在零部件中接入总线方式一般为CAN_H和CAN_L接入前提就是需要知道引脚一般使用DB9的头子,而整车得接入一般通过ODB口接入整车。
(ODB转接头)
(DB9转接头)
说到转接头了那么我们还需要的就是CANBOX了,有了CAN盒子我们才能与之进行通信,CAN盒子的话市面上常见的PEAK-CAN(支持Liunx,性价比较高),USBCAN(可视化操作更便捷),CANOE(功能最强大,最昂贵)等等设备,根据自己的实际情况选择吧,到这里我们就可以进行对CAN的测试了。
(CANOE)
(PEAK-CAN)
CANBOX准备好了那么就可以监听CAN总线了,在接入CAN总线时需要设置波特率,CAN一般为500k,CANFD一般为500k/2m。在Windows下直接根据CAN盒子配套的软件可视化设置就好,Liunx下需要自行配置:
CAN/CANFD:
1、首先关闭can通道:
sudo ip link set down can0
2、设置can通道的波特率:
sudo ip link set can0 type can bitrate 500000 //CAN
sudo ip link set can0 type can sample-point 0.5 bitrate 500000 dbitrate 2000000 dsample 0.5 fd on//CANFD
3、开启CAN通道
sudo ip link set up can0
发送数据使用cansend,接收数据使用candump就能进行监听了
(Linux)
(Windows)
以上是接入CAN总线的数据,可以开始对总线进行测试了!
TCV 0.5
评论10次
老哥你测试的时候拿自己的车测试的么?还是有个CAN盒子就能模拟了
如果自己研究可以模拟,车的话也行
大佬能说想详细点么,如果自己没有条件弄到相关零件,模拟的话咋模拟有相关的文章么?
还有日常中更容易接触到的干活吗,比如蓝牙模块相关的
感觉都是网上已有的内容,能不能来点干货。
车联网的文章还是比较少,多发点
老哥你测试的时候拿自己的车测试的么?还是有个CAN盒子就能模拟了
如果自己研究可以模拟,车的话也行
基本不会用自己车的噻 一般都是车企把ECU零部件快递寄到实验室,然后根据引脚定义上电,连接CAN高CAN低接入总线测试
自己的车其实也可以
大佬can测试一般能测什么内容啊?重放?
重放,uds相关,DOS等等
大佬can测试一般能测什么内容啊?重放?
基本不会用自己车的噻 一般都是车企把ECU零部件快递寄到实验室,然后根据引脚定义上电,连接CAN高CAN低接入总线测试
老哥你测试的时候拿自己的车测试的么?还是有个CAN盒子就能模拟了